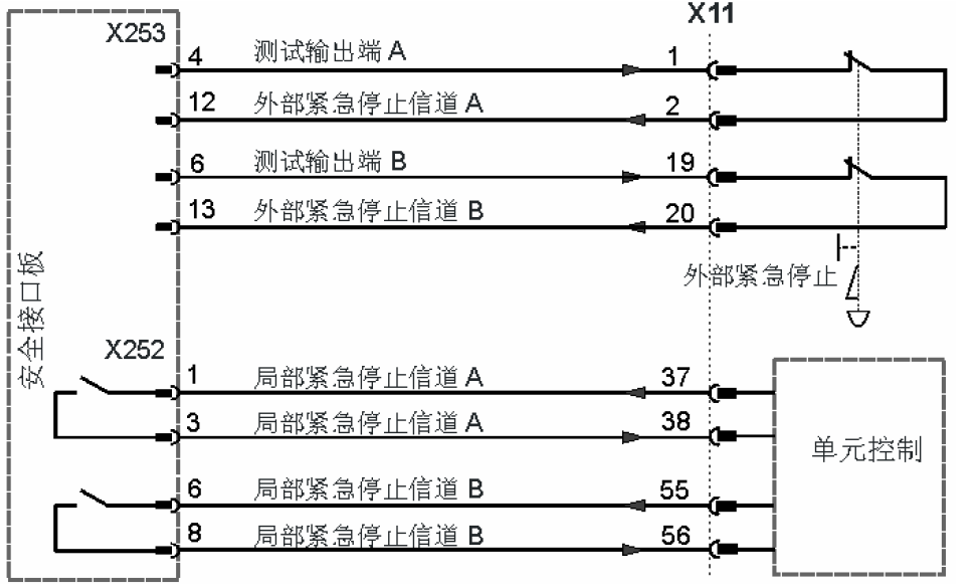
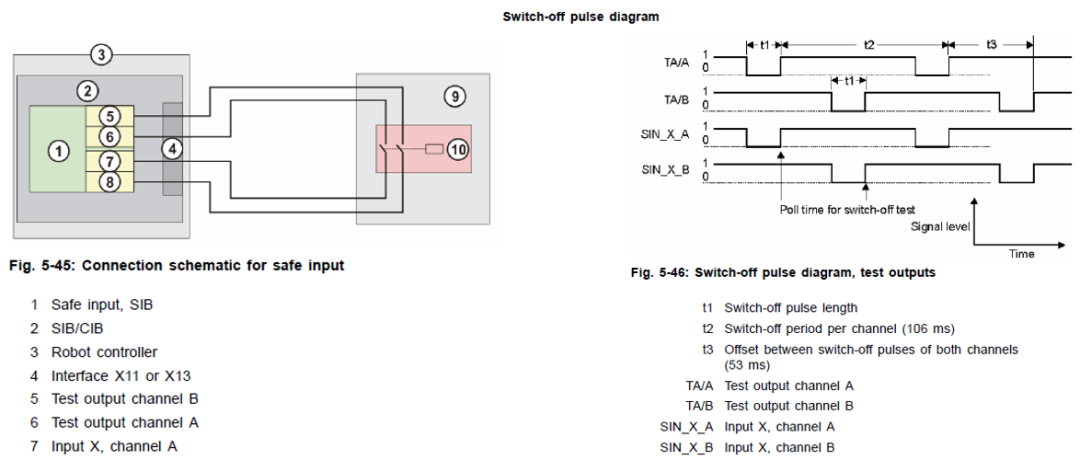
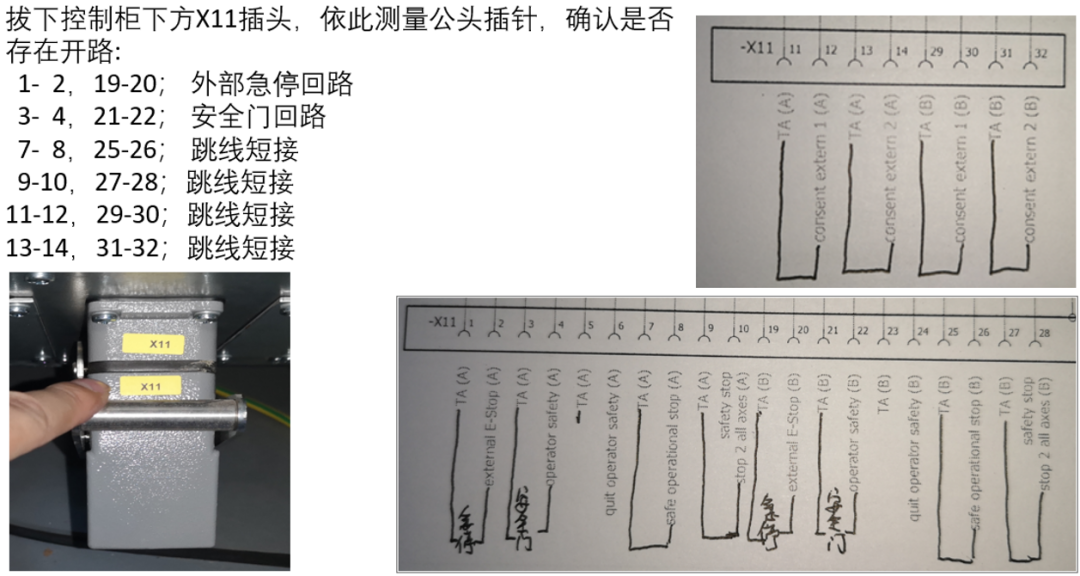
- 为什么要双回路,我只用单回路行吗?
- 那我把两路线接一个触点可以吗?
- 我们用的不是安全门锁,是安全光栅,怎么办?
- 我设备改PorfiSafe后信号都给了怎么还是上不了使能?
答: 为了保证人的绝对安全。
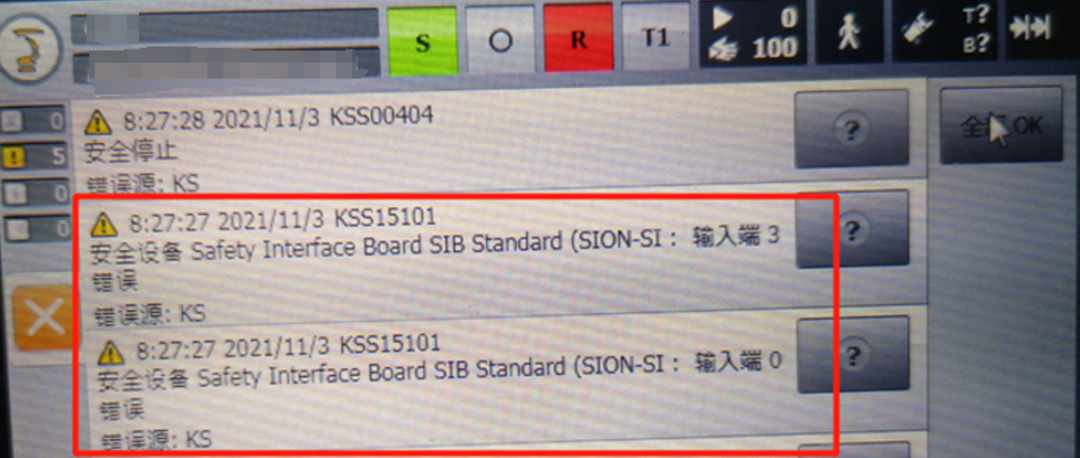
答:因为库卡更注重用户的安全,能检测出双回路的异常,比如触点粘连。之前遇到这个报警的小伙伴们可以考虑一下,是不是X11没有接好导致的。
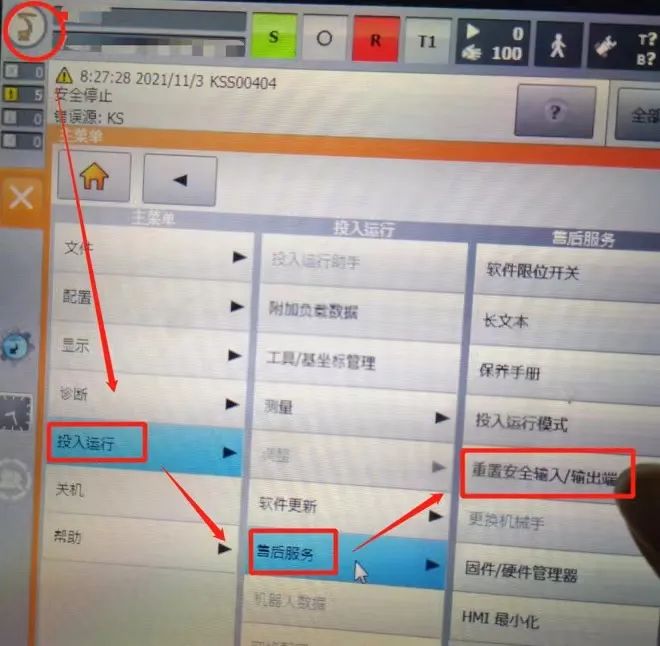
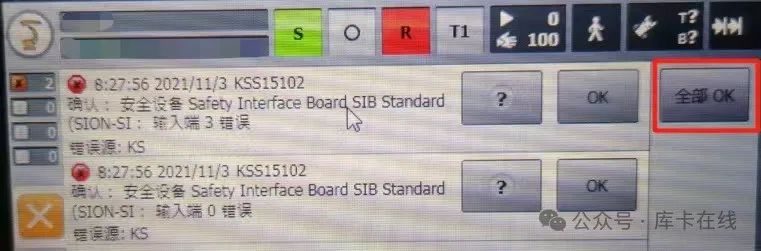
遇到了这个报警如何处理?

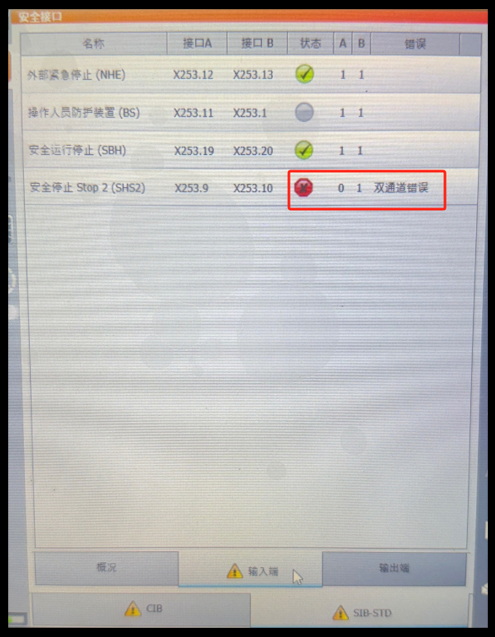
答:原理上,只要双回路不是同断同开,就会触发这个报警。
- 某些品牌的安全开关两个触点设计上就是有时延的,不会同时断开。
- 出现了问题,双回路的一根线断了或者接触不良也会出现,比如X11端子插针压接的问题。
- 使用了劣质的中间继电器(根据安全要求应使用安全继电器)。
|
|
|
|
|
|
|
|
|
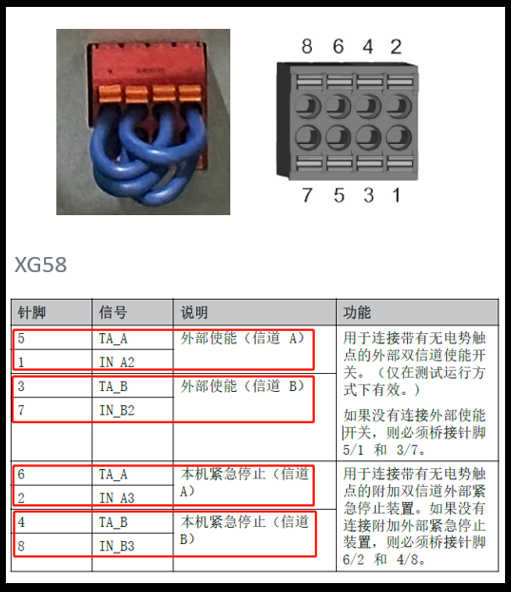
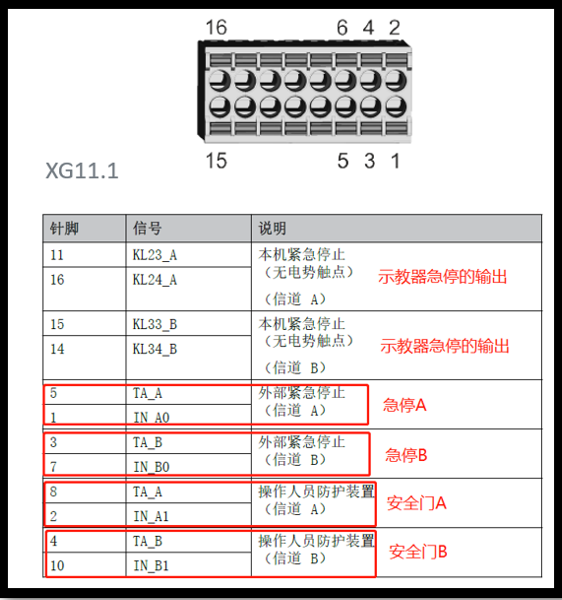
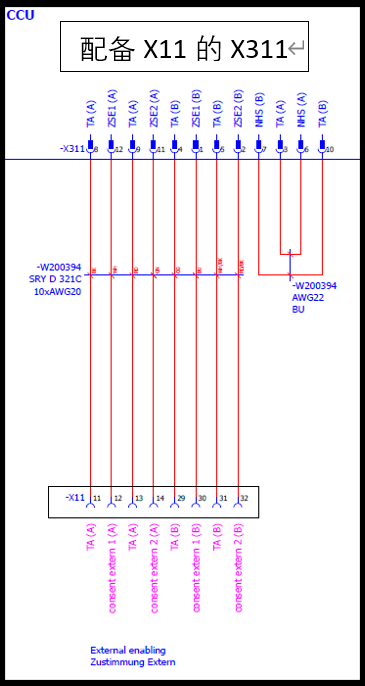
- 如果购买机器人时配备了X11,那么CCU上的X311会引出到X11相应的针脚。
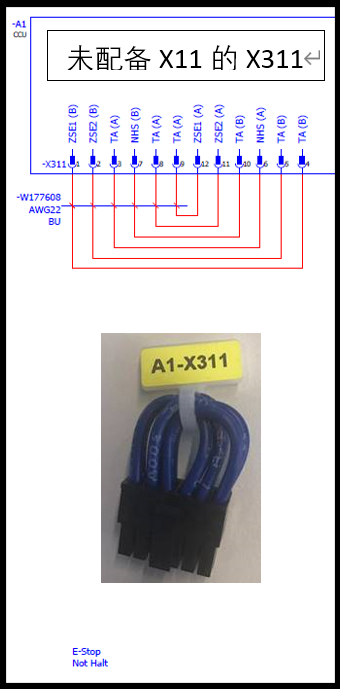
- 但若购买时就选择了Profinet/EthernetIP/EtherCat并且没有选取X11,则CCU上会配置一个X311短插屏蔽掉外部使能的硬接线。
- 所以,如果购买了X11,想换成Profisafe,仍需要在X11处按照第三章节将外部使能短接掉。
- 出现这种情况除了上述方法判定,还有个T1/T2无法上使能的,自动却可以上使能的的显著特征。